


英国核修复服务公司(NRS)正在奥尔德伯里核电站与RAICo合作,试用远程操控机器人,用于分拣燃料元件碎片(FED)。这类碎片来自含有核燃料的部件,放射性强,长期以来只能由操作人员穿戴全套个人防护装备,借助带夹爪的长柄工具,隔着厚重防护墙进行分拣。
按照现有方式,操作人员需要通过屏幕观察夹爪动作,小心抓取形状不规则的碎片,再将其放入不同容器,供后续处置或处理。这项工作既考验经验和手感,也容易带来辐射暴露和身体疲劳。NRS希望通过机器人手臂,让人员在更安全的位置完成同样精细的操作。
自2025年底以来,RAICo与NRS Oldbury合作开发触觉控制系统。项目团队选择了一款配备双指夹爪的机械臂,并开发出触觉遥控分拣系统。操作人员的手部动作可通过触觉控制器传递给机器人夹爪,机器人端的反馈也会传回操作人员,使远程操作更接近现场手动操作的感觉。RAICo还为市售触觉设备与机械臂之间的连接开发了定制软件,以解决系统集成难题。
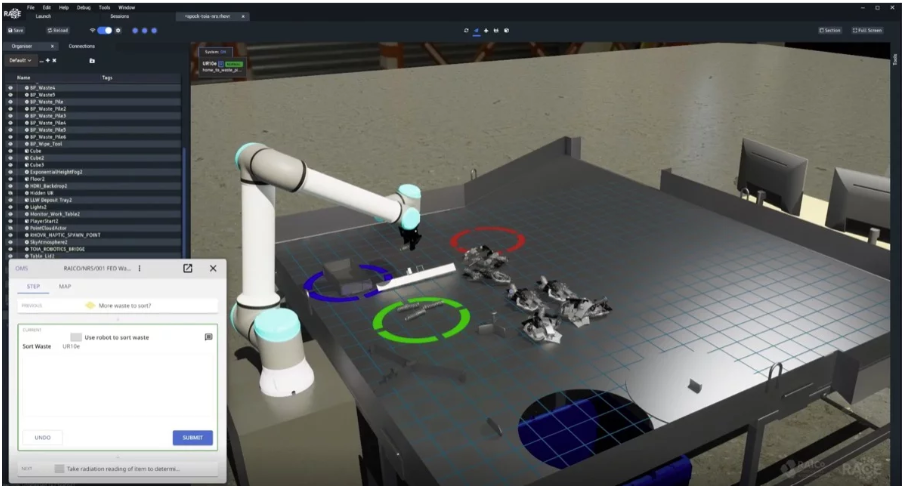
与此同时,RAICo数字团队还设计了数字化操作员控制界面原型,并将其接入SPOCK单点操作员控制套件。通过这一界面,操作人员可以同时查看实时摄像头画面和燃料元件碎片分拣单元的虚拟三维图像。系统还可叠加机器人状态、传感器数据和任务要求,并用网格、运动预演等视觉提示,帮助操作人员在执行动作前判断机械臂是否可能发生碰撞。
2026年3月,RAICo已在NRS Oldbury现场演示触觉控制系统和数字用户界面。演示设备目前仍留在现场,操作人员也在向其他团队介绍该系统,现阶段反馈较为积极。RAICo和NRS正推动在奥尔德伯里开展正式试验,目标是最终实现全面部署。
NRS机器人和人工智能技术经理Scott Powell表示,这项创新为机器人承担放射性碎片分拣等棘手手动作业打开了道路,使操作人员能在安全距离外更高效地完成任务。他同时表示,这并不是简单接入一台现成机器人就能完成的工作,系统需要大量改造,才能真正适合操作人员使用。
NRS认为,这类机器人系统有望改善核退役现场的工作条件,减少人员辐射暴露、体力消耗以及对笨重防护装备的依赖。相关底层技术未来还可用于热室、手套箱等危险封闭环境。英国原子能管理局材料研究中心也在开展类似项目,探索利用触觉反馈和SPOCK技术升级用于拆封放射性物质样品的机械臂。
免责声明:本网转载自合作媒体、机构或其他网站的信息,登载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其内容的真实性。本网所有信息仅供参考,不做交易和服务的根据。本网内容如有侵权或其它问题请及时告之,本网将及时修改或删除。凡以任何方式登录本网站或直接、间接使用本网站资料者,视为自愿接受本网站声明的约束。
