


据6月1日ITER官网发布文章,专用机器人、机器视觉系统和力传感技术正帮助国际热核聚变实验堆(ITER)应对聚变工程中最棘手的挑战之一——托卡马克装置内部的组装与未来维护。ITER操作和机器人专家Raphael Hery表示:"我们在建造这台机器的同时,也在为未来做准备。"
由于真空容器内的辐射水平最终将使高功率运行期间的人员直接操作变得不切实际,ITER的容器内组件从设计之初就以远程操作为目标。一些包层屏蔽块重达4吨,偏滤器盒重达9吨,且需通过狭窄开口运输,在充满结构、冷却系统和面向等离子体组件的环境中精确定位。ITER及其工业合作伙伴正在开发的新一代重型机器人中,许多系统目前在市场上尚无同类产品。
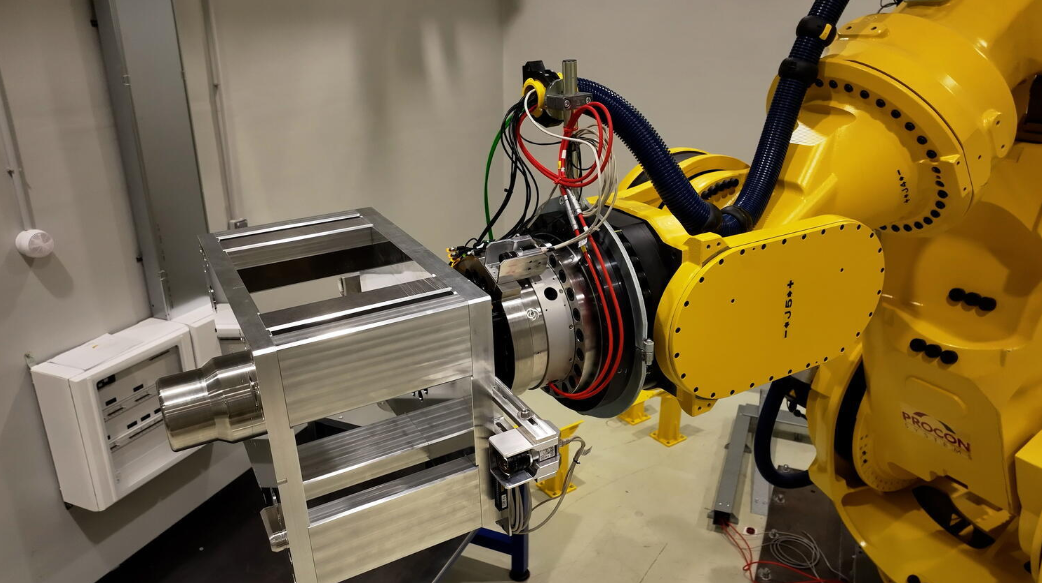
ITER正使用一台4米高、有效载荷达2.3吨的FANUC M2300i机器人作为开发平台,试验和集成计划用于舱内装配的工具和技术。同时,团队还在开发包层组件运输器、专用偏滤器组件系统、远程操作搬运设备和模块化平台。
机器视觉方面,芬兰Operview公司与ITER合作,将学术研究成果转化为远程操作视觉系统。大型机械臂在重载下会发生形变,视觉系统通过直接激光蚀刻在不锈钢表面的光学标记进行补偿,测试表明定位精度可达约0.06毫米。ITER还与德国HBK公司合作开发专用力矩传感器,赋予机器人触觉反馈能力,使其能检测接触力、避免碰撞,并在释放重物时逐步降低张力以减少振动。这些传感器需在辐射环境中保持精确测量性能,并满足ITER的抗震要求。
Hery表示,ITER通常在内部开发初始概念和设计,再与工业合作伙伴将其转化为可运行系统,"我们会将设计推向理论性能极限,然后与相关领域的公司合作将其变为现实。"为ITER开发的机器人技术正在将工业机器人推向新的应用领域。
免责声明:本网转载自合作媒体、机构或其他网站的信息,登载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其内容的真实性。本网所有信息仅供参考,不做交易和服务的根据。本网内容如有侵权或其它问题请及时告之,本网将及时修改或删除。凡以任何方式登录本网站或直接、间接使用本网站资料者,视为自愿接受本网站声明的约束。
