


美国大学研究人员和STEM学生正在为DOE的核工业项目体开发机器人系统。
1、环境修复工作

美国能源部(DOE)环境管理办公室(EM)的任务是解决冷战50年期间核武器生产和政府资助的核能研究项目造成的环境遗留问题。
这一“遗产”包括世界上最危险的放射性区域,其中有大量放射性废物、核废料、多余的钚和铀、数千个受污染的核设施,以及受污染的土壤和地下水。
EM成立于1989年,负责应对冷战遗留问题的清理和剩余核材料的管理。
作为世界上最大的环境清理项目,EM已负责清理美国全国107个地点,其总面积相当于美国罗德岛州和特拉华州的总和。
EM在核废料清理的几乎每个领域都取得了实质性进展,并已完成其中91个地点的清理。
自1995年以来,佛罗里达国际大学(FIU)应用研究中心通过在高放废物管理领域进行应用研究,为EM任务做出了贡献;停用和退役;土壤和地下水;机器人技术;信息技术;以及科学、技术、工程和数学(STEM)教育和培训。
以下是FIU为支持EM环境修复工作而开发的各种机器人。
2、外部管道爬行机器人
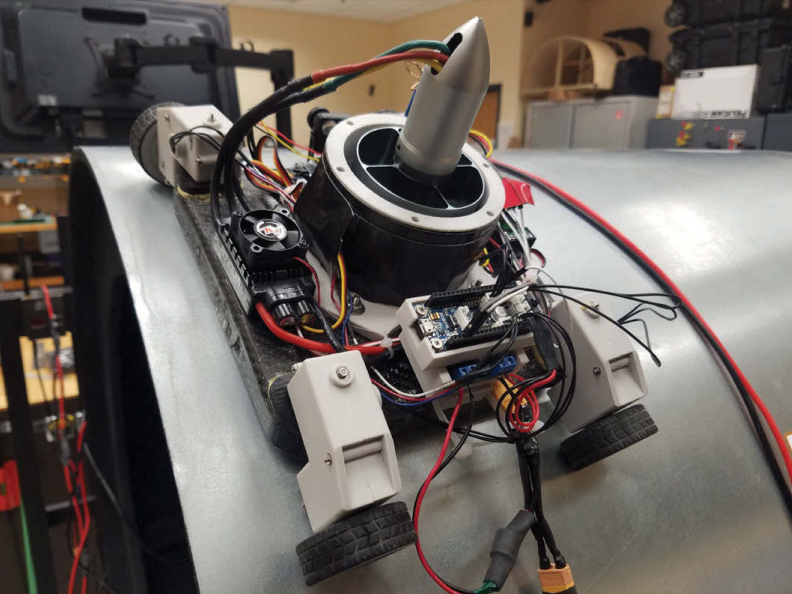
图1:外部管道爬行机器人台架试验
FIU正在开发一种爬行机器人,可以帮助评估萨凡纳河(Savannah River)现场H Canyon排气隧道的结构完整性。
60多年来,由于隧道排出的放射性和酸性烟雾,隧道的混凝土墙已经损毁。
这项研究是与美国佛罗里达大学和德克萨斯大学奥斯汀分校联合进行,这两所大学通过DOE的核能大学项目平台开发机器人,该机器人平台将开发和部署爬行机器人,并提供检查隧道的手段。
爬行利用电子管道风扇产生动力,使系统能够在排气通道内3英尺直径的铝管道整个圆周上导航爬行,移动平台由我们的合作者开发。
爬行履带的底盘设计与管道的几何形状相匹配,以便在履带底盘的下侧和管道表面之间保持一致的分离距离(图1)。
管道是圆柱形的,履带设计为在四个车轮的每个车轮上使用2-DOF(自由度)电机安装装置。
可以让履带横向移动,然后径向移动,或者反之亦然,移动到管道表面上的任何点,直到到达所需位置。
履带可以配备一套传感器,以帮助表征隧道内的条件,包括辐射、热和湿度传感器。
利用车载摄像头,工程师将能够直观地评估管道后面墙壁的损坏情况。
履带的最终原型将能够执行半自主或自主任务,目标是成为一个多功能系统,可用于帮助隧道的结构评估,并提供隧道内条件的信息。
3、内部管道爬行机器人
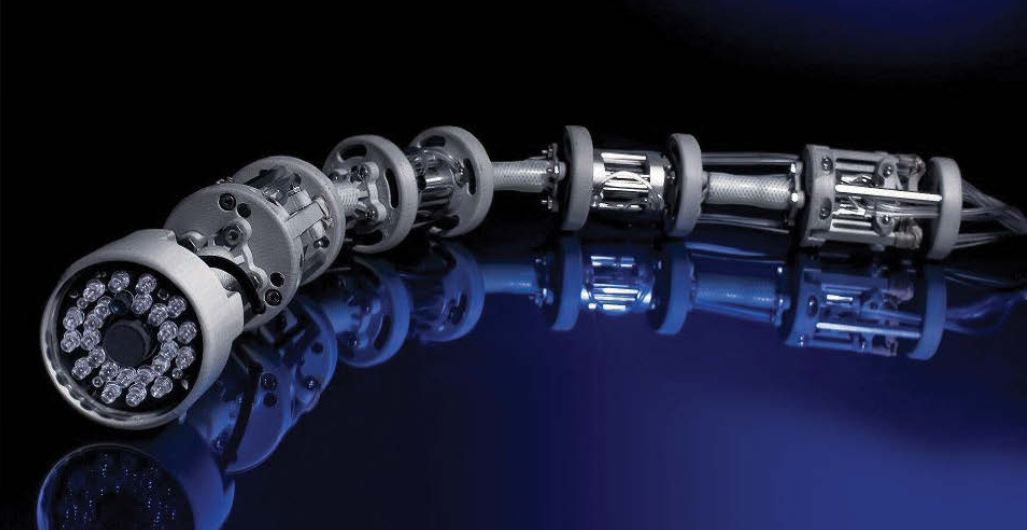
图片图2:3英寸和4英寸内部爬行机器人
FIU还为DOE开发多个内部管道爬行机器,用于管道和基础设施的检查(图2)。
已经开发了许多用于工业中各种应用的管道爬行机器人,但很少有人专注于小直径管道。
FIU的第一台管道爬行机器人由EM资助,设计用于穿过直径3英寸和4英寸、长度可达150英尺的管道,并在多个45°和90°的角度中导航。导航通过汉福德的双壳罐空气供应线,以提供有关油箱内完整性的信息。
爬行机器人由两个夹持管壁的夹具和两个可伸缩的伸缩器组成。
这四个模块使用气动制动器,并依次启动以提供向前和向后的运动。
该单元包括位于单元前部的用于实时视频反馈的摄像头、为制动器提供空气的系绳以及摄像头的电源和数据线。
由于该系统是模块化的,因此可以根据需要添加额外的夹具或延长器。
FIU也在发展传感器模块,可以集成到系统中,并可以提供一套传感器,包括光探测和测距(LiDAR)系统、超声波传感器和环境传感器。
爬行机器人的结构非常简单,成本效益高,使用了3D打印部件和商用现成的制动器、摄像头和传感器。

图3:6英寸内管道爬行机器人原型机
除了3英寸和4英寸管道爬行机器人外,FIU正在开发一种6英寸,其工作方式与其正在开发中的姊妹爬行机器人类似,以穿过6英寸排水管(图3)。
汉福德双壳罐的排水管与二次衬里下方的排水槽相匹配,并为检查二次衬里提供了一条途径。
6英寸版本的预期目的是用90°弯头在大约50英尺的管道中导航,并部署一个儿童漫游车——一个安装在较大漫游车上的较小机器人设备,可以穿过排水槽,并提供有关二次衬完整性的信息。
与较小的爬行机器人不同,这个版本预计在管道内的结垢、水和泥浆检查方面会有重要意义。
对最终设计进行了修改,以解决这些约束条件,其中引导件将有助于移动经过缩放和气动制动器,气动制动器垂直于夹持器,以最大化夹持力。
图3显示了初始设计原型和更坚固的原型,具有更坚固的框架和更强的拉力。该系统还可以增加传感器模块,以提供关于管道内部的附加信息。

图4:2英寸爬行机器人原型机
FIU还在开发一种履带式设备,该设备可在2英寸直径的管道中导航(图4),由DOE国家能源技术实验室资助,旨在检查化石能源发电厂的过热器线路。
由于管道直径较小的限制,气动执行机构是不可能的,因此采用了螺母/导螺杆设计。
此外,过热器管线具有180°弯曲,弯曲半径不同。这需要一个明显更小的模块几何形状,电机只能提供较大履带产生的拉力的一小部分。预计该装置将需要与多个履带相连,以穿过过热器管线的整个长度。
与其他爬行机器人类似,框架由3D打印材料制成,系统组件可在市场上买到。
该系统还将具有额外的模块,这些模块将容纳小型超声波传感器,这些传感器提供有关管道完整性的信息。
4、微型漫游车
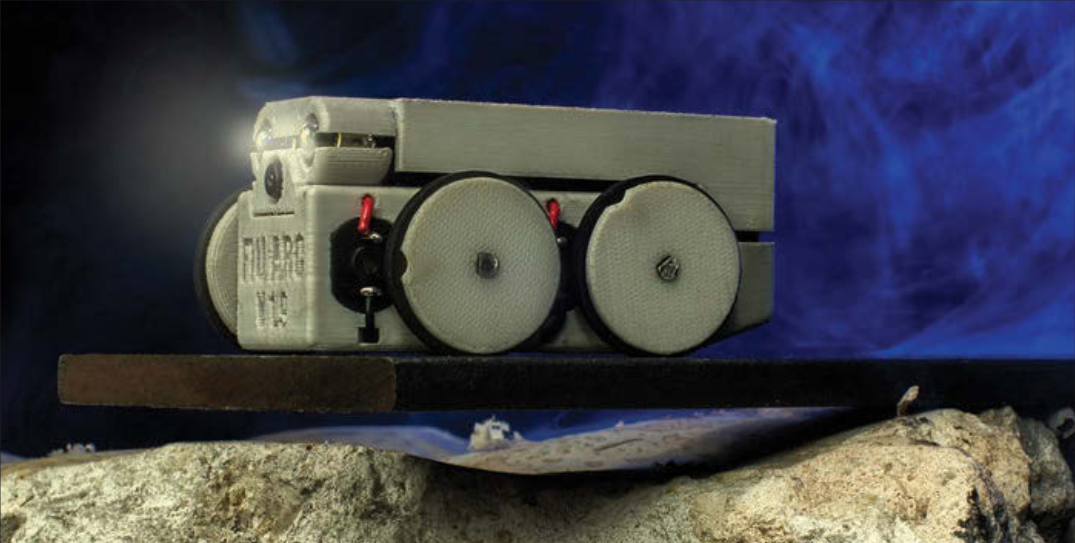
图5:微型漫游车的初始原型
FIU一直在开发一种微型漫游车,用于在汉福德的双壳罐主内衬下方的耐火材料槽中导航。
槽分配空气以冷却储罐的主衬里,并提供了获得储罐具体情况信息的最佳方法。
对于汉福德的大多数罐来说,槽宽约1英寸,结构像从罐中心伸出的树枝。
油箱内衬由碳钢制成,可以使用磁铁将漫游车粘附在油箱内衬的下侧。
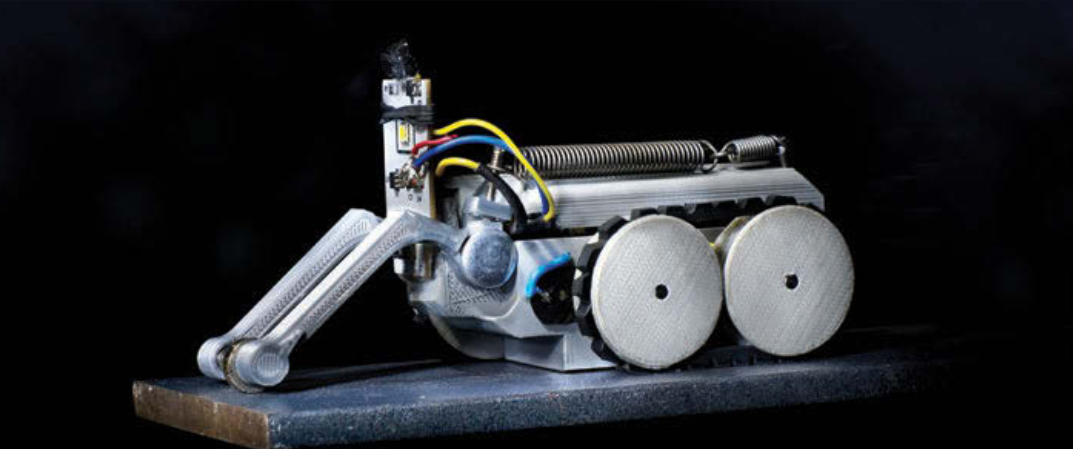
图5:微型漫游车的最终原型
漫游车(图5)可以通过储罐的环形空间部署,并可以从环形空间进入任何耐火材料槽。
然后,它需要行驶大约35英尺才能到达油箱的中心。漫游车由四个独立驱动的轮子提供动力,包括一个摄像头和一个磁性机械臂,使该装置能够在焊缝上导航。
在不久的将来,一个额外的模块,包括一个超声波传感器,将连接到漫游车的后部,该传感器能够测量内衬的厚度并识别关注区域
5、外骨骼

图6:用于人体测试的肌电图传感器,放置在手上
开发机器人操纵器/手和操作员辅助设备(如可穿戴机器人设备(外骨骼和传感器)),可以最大限度地减少工人疲劳和员工伤害。
外骨骼可最大限度地减少操作员的肌肉疲劳和受伤,而机器人操作器可用于自动化重复和预定义的常规任务。
FIU与佛罗里达大西洋大学和爱达荷国家实验室合作,计划开展一个由EM资助的机器人研究项目。
该项目的目标是量化手套箱操作期间的人体疲劳操作,并评估用于这些任务的灵巧机器人机械手的可行性。
研究包括调查各种手套箱任务,在执行任务时使用肌电图传感器检测人体肌肉疲劳,定制机械手和手臂组合以执行相同任务,以及两种测试方法之间性能比较的统计分析:使用人类执行任务和使用机械臂/手执行相同的任务。
此外,在该项目的第二阶段,FIU团队扩大了研究范围,包括开发一种新型设计以及外骨骼机构的原型设计和测试。
作为第一步,FIU团队专注于开发高精度肌电图设备,这是业界首个经过Wi-Fi认证的内置Wi-Fi连接的单片微控制器。
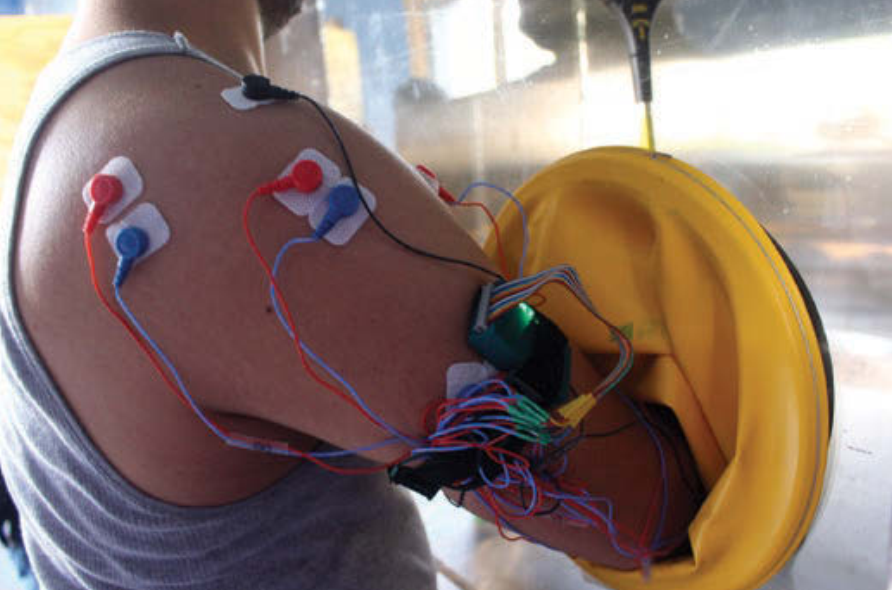
图6:用于人体测试的肌电图传感器,放置在手臂上
该传感器的目的是量化手套箱操作过程中的人体疲劳。传感器(图6)用于人体测试和数据采集。
传感器的优点包括其低姿态的特性和传感器的放置范围,这使得设备能够准确地记录,同时使手和手臂不受阻碍,并具有充分的灵活性。
为了使用肌电图设备量化人体疲劳,人体受试者获得了机构审查委员会的批准。
实验期间使用了i-Limb量子机械手。
这只手带有一个用户控制的界面,有两个输入来打开和关闭手。
一个名为BioSim的应用程序可以用于在所选择的抓握类型之间切换,如手指敲击、强力抓握、横向卡夹或拇指和食指之间的精确抓握。
为了使用为该项目设计的控制器操作手,选择了Teensy 3.6微控制器。
该微控制器能够输出两个模拟信号用于手动控制,这两个信号由操作员通过操纵杆指定,以打开和关闭手。
此外,UR5机械臂被编程为在用户控制机械手的同时自主运行。这允许预先编程的路径,这些路径独立于对手臂的控制来处理挖砂和刷砖任务。
手臂和手初始化后,将手插入手套中。
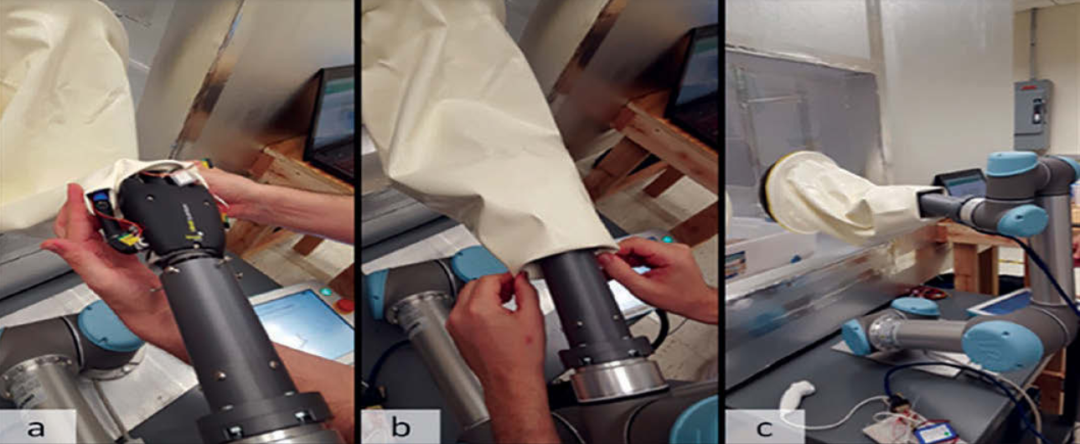
图7:将手插入手套箱进行测试的步骤:(a)将指尖插入手套的初始手姿势,(b)将手完全插入手套,以及(c)将手插入到手套箱的手臂。
这是通过将手配置为预先编程的姿势,并将指尖插入手套来完成的(图第7a段)。
手臂程序开始将手穿过手套开口,同时用户将手套进一步滚动到手上(图7b)。
这种情况一直持续到手完全处于手套箱中运行任务的起始位置(图7c)。
按照相反的顺序,进行同样的程序,将手从手套箱中取出,运行预先编程的轨迹进行取出。
在人体测试过程中设置的刷砖任务也用于机器人测试。
四块砖被放置在手套箱中,呈弧形配置,这样机器人就可以够到每一块砖。
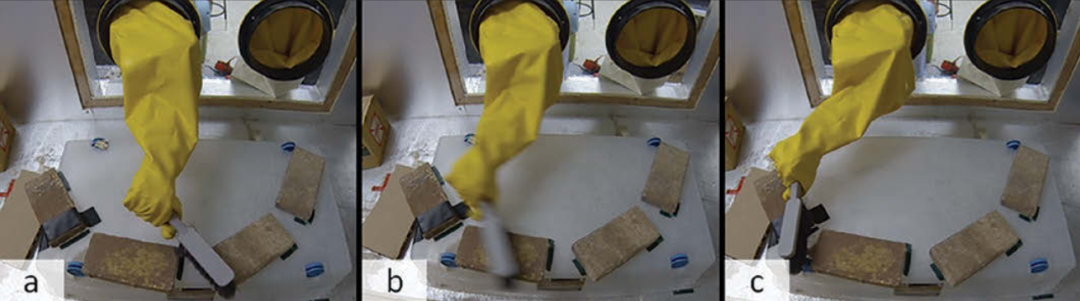
图8:一次刷砖动作过程图片
对于该任务,机器人被编程为刷每块砖10次,然后前进到下一块砖,如图8所示。
一直循环到最后一块砖,并在实验期间重复进行。
用户界面允许参与者在整个实验过程中控制抓握刷子的手,同时手臂根据预先编程的路径计划自主移动。
6、辐射测绘
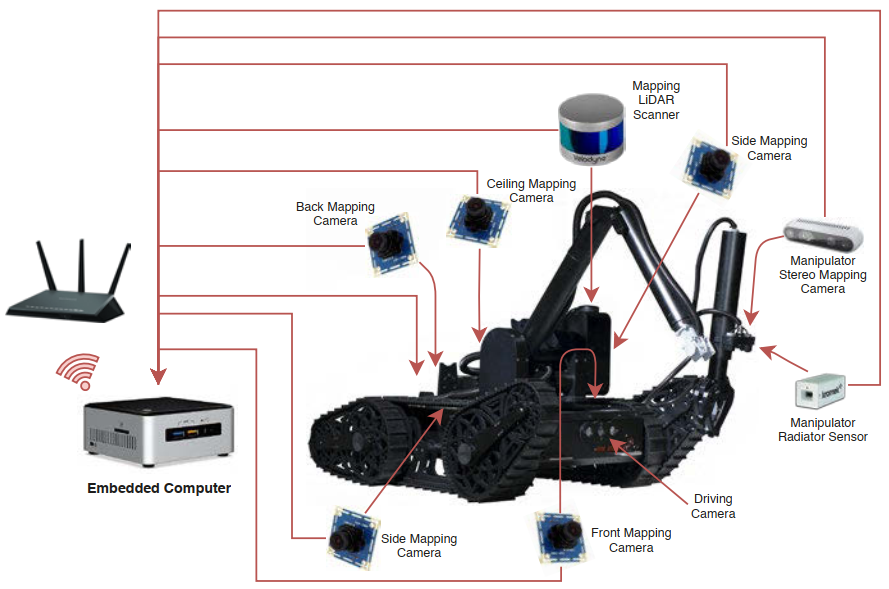
图9:Jaguar V6履带式机器人平台,配有机械臂和仪器。
准确的设施特征信息是成功理解放射性危害、规划清理工作和实现DOE标准和指南制定的质量保证目标的关键因素。
在表征设施时,先进的自主系统是安全、高效、经济高效的工具,可以安全地部署最先进的仪器,而不会使工人面临辐射风险。
考虑到许多设施的大尺寸,再加上辐射传感器的高成本和放射源的性质,移动系统为目前的现场传感器网络或现场人员进行的手动测量提供了一种具有成本效益的替代方案。
自主系统还可用于在运行、退役和/或最终状态评估期间评估设施状况所需的连续辐射测量。
这项研究的目的是通过提供无损伽马测量、激光和视觉测绘,以及可能的放射性基础设施和设施的高光谱成像数据,支持核电站停用和退役活动。
如图9所示,Jaguar V6履带式机器人平台配备了一个机械臂,该机械臂携带一个末端执行器,该末端执行器与一个紧凑的高性能伽马射线光谱仪和一个深度相机相耦合。
平台上安装了几台摄像机和一台多通道三维激光雷达,以便于自主导航和绘制地图。
5-DOF机械臂增加了系统执行辐射传感和映射的能力,因为传感器和深度相机可以定位在狭小且难以到达的位置。
FIU团队一直在测试机器人操作系统社区中提供的几个最先进的同步定位和映射(SLAM)软件包。

图10:FIU应用研究中心机器人实验室

图10:同一实验室,在实施基于实时外观的映射后
图10显示了使用基于实时外观的映射(RTAB映射)的初步映射结果。
点云——通常由3D扫描仪产生的空间中的一组数据点,
使用3D激光雷达数据和采用视觉SLAM算法的立体相机图像来生成测量周围物体外表面上的许多点的图像。
连续的相机帧被用来跟踪设定点,并对其三维位置进行三角测量,同时使用这些信息来近似确定相机位置。
对于辐射建模策略,环境中存在的辐射水平,将由位于无人地面飞行器末端执行器的高性能辐射传感器测量。
传感器收集的数据将被同化到一个连续的随机分布模型中,以便能够在未观测到的位置进行统计一致的预测,从而估计辐射分布。
该团队还致力于开发一种自适应采样策略,以指导机器人的运动。
与建模策略类似,我们正在利用高斯过程回归对预期辐射分布进行建模,以选择采样位置。
回归是使用以前在类似应用中使用的Matérn核方法完成的。
7、展望未来

EM在过去30年中取得了巨大进步,但在未来几十年将面临非常困难的环境修复挑战,机器人的使用将在EM未来的努力中发挥重要作用。
这里概述的研究工作在研究和教育方面都有很多好处。
除了为新兴市场环境修复任务提供工程和研究解决方案外,这些项目还为FIU的STEM学生提供了机会,以提高他们的知识和技能,并有可能为他们未来就业做好准备。
免责声明:本网转载自合作媒体、机构或其他网站的信息,登载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其内容的真实性。本网所有信息仅供参考,不做交易和服务的根据。本网内容如有侵权或其它问题请及时告之,本网将及时修改或删除。凡以任何方式登录本网站或直接、间接使用本网站资料者,视为自愿接受本网站声明的约束。
